
Unique Paths
There is a robot on an m x n grid. The robot is initially located at the top-left corner (i.e., grid[0][0]). The robot tries to move to the bottom-right corner (i.e., grid[m - 1][n - 1]). The robot can only move either down or right at any point in time.
Given the two integers m and n, return the number of possible unique paths that the robot can take to reach the bottom-right corner.
The test cases are generated so that the answer will be less than or equal to 2 * 109.
Example 1:
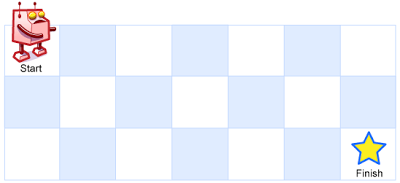
Input: m = 3, n = 7 Output: 28
Example 2:
Input: m = 3, n = 2 Output: 3 Explanation: From the top-left corner, there are a total of 3 ways to reach the bottom-right corner: 1. Right -> Down -> Down 2. Down -> Down -> Right 3. Down -> Right -> Down
Constraints:
1 <= m, n <= 100
On This Page
Also Explore
DSA Questions
Spiral Matrix
DSA Questions
Jump Game
DSA Questions
Merge Intervals
DSA Questions
Insert Interval
DSA Questions
Length of Last Word
DSA Questions
Spiral Matrix II
DSA Questions
Permutation Sequence
DSA Questions
Rotate List
DSA Questions
Unique Paths
DSA Questions
Unique Paths II
DSA Questions
Minimum Path Sum
DSA Questions
Valid Number
DSA Questions
Plus One
DSA Questions
Add Binary
DSA Questions
Text Justification
DSA Questions
Sqrt(x)
DSA Questions