
Path With Minimum Effort
You are a hiker preparing for an upcoming hike. You are given heights, a 2D array of size rows x columns, where heights[row][col] represents the height of cell (row, col). You are situated in the top-left cell, (0, 0), and you hope to travel to the bottom-right cell, (rows-1, columns-1) (i.e., 0-indexed). You can move up, down, left, or right, and you wish to find a route that requires the minimum effort.
A route's effort is the maximum absolute difference in heights between two consecutive cells of the route.
Return the minimum effort required to travel from the top-left cell to the bottom-right cell.
Example 1:
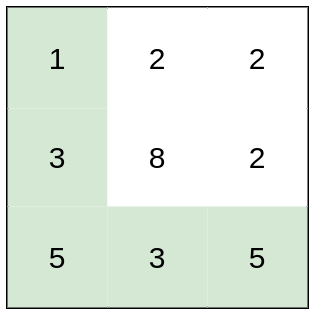
Input: heights = [[1,2,2],[3,8,2],[5,3,5]] Output: 2 Explanation: The route of [1,3,5,3,5] has a maximum absolute difference of 2 in consecutive cells. This is better than the route of [1,2,2,2,5], where the maximum absolute difference is 3.
Example 2:
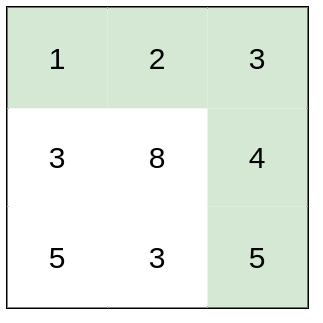
Input: heights = [[1,2,3],[3,8,4],[5,3,5]] Output: 1 Explanation: The route of [1,2,3,4,5] has a maximum absolute difference of 1 in consecutive cells, which is better than route [1,3,5,3,5].
Example 3:
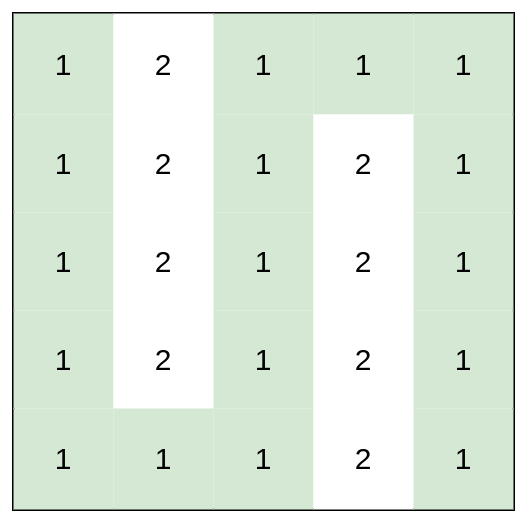
Input: heights = [[1,2,1,1,1],[1,2,1,2,1],[1,2,1,2,1],[1,2,1,2,1],[1,1,1,2,1]] Output: 0 Explanation: This route does not require any effort.
Constraints:
rows == heights.lengthcolumns == heights[i].length1 <= rows, columns <= 1001 <= heights[i][j] <= 106
On This Page
Also Explore
DSA Questions
All Valid Triplets That Can Represent a Country
DSA Questions
Largest Substring Between Two Equal Characters
DSA Questions
Best Team With No Conflicts
DSA Questions
Graph Connectivity With Threshold
DSA Questions
Design an Expression Tree With Evaluate Function
DSA Questions
Slowest Key
DSA Questions
Arithmetic Subarrays
DSA Questions
Path With Minimum Effort
DSA Questions
Rank Transform of a Matrix
DSA Questions
Percentage of Users Attended a Contest
DSA Questions
Add Two Polynomials Represented as Linked Lists
DSA Questions
Hopper Company Queries I
DSA Questions
Sort Array by Increasing Frequency
DSA Questions