
Find Closest Node to Given Two Nodes
You are given a directed graph of n nodes numbered from 0 to n - 1, where each node has at most one outgoing edge.
The graph is represented with a given 0-indexed array edges of size n, indicating that there is a directed edge from node i to node edges[i]. If there is no outgoing edge from i, then edges[i] == -1.
You are also given two integers node1 and node2.
Return the index of the node that can be reached from both node1 and node2, such that the maximum between the distance from node1 to that node, and from node2 to that node is minimized. If there are multiple answers, return the node with the smallest index, and if no possible answer exists, return -1.
Note that edges may contain cycles.
Example 1:
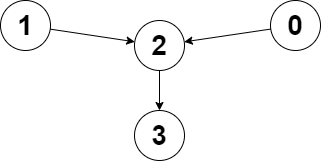
Input: edges = [2,2,3,-1], node1 = 0, node2 = 1 Output: 2 Explanation: The distance from node 0 to node 2 is 1, and the distance from node 1 to node 2 is 1. The maximum of those two distances is 1. It can be proven that we cannot get a node with a smaller maximum distance than 1, so we return node 2.
Example 2:
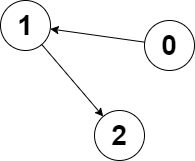
Input: edges = [1,2,-1], node1 = 0, node2 = 2 Output: 2 Explanation: The distance from node 0 to node 2 is 2, and the distance from node 2 to itself is 0. The maximum of those two distances is 2. It can be proven that we cannot get a node with a smaller maximum distance than 2, so we return node 2.
Constraints:
n == edges.length2 <= n <= 105-1 <= edges[i] < nedges[i] != i0 <= node1, node2 < n
On This Page
Also Explore
DSA Questions
First Letter to Appear Twice
DSA Questions
Equal Row and Column Pairs
DSA Questions
Design a Food Rating System
DSA Questions
Number of Excellent Pairs
DSA Questions
Maximum Number of Books You Can Take
DSA Questions
Number of Unique Subjects Taught by Each Teacher
DSA Questions
Make Array Zero by Subtracting Equal Amounts
DSA Questions
Maximum Number of Groups Entering a Competition
DSA Questions
Find Closest Node to Given Two Nodes
DSA Questions
Longest Cycle in a Graph
DSA Questions
Minimum Costs Using the Train Line
DSA Questions
Generate the Invoice
DSA Questions
Merge Similar Items
DSA Questions
Count Number of Bad Pairs
DSA Questions
Task Scheduler II
DSA Questions
Minimum Replacements to Sort the Array
DSA Questions