
Find Eventual Safe States
There is a directed graph of n nodes with each node labeled from 0 to n - 1. The graph is represented by a 0-indexed 2D integer array graph where graph[i] is an integer array of nodes adjacent to node i, meaning there is an edge from node i to each node in graph[i].
A node is a terminal node if there are no outgoing edges. A node is a safe node if every possible path starting from that node leads to a terminal node (or another safe node).
Return an array containing all the safe nodes of the graph. The answer should be sorted in ascending order.
Example 1:
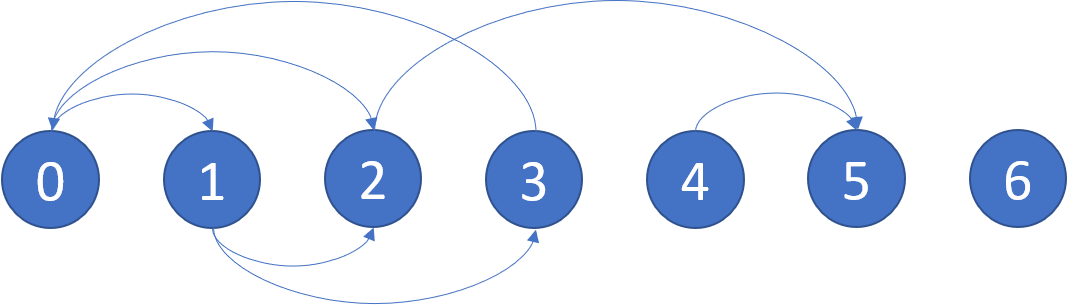
Input: graph = [[1,2],[2,3],[5],[0],[5],[],[]] Output: [2,4,5,6] Explanation: The given graph is shown above. Nodes 5 and 6 are terminal nodes as there are no outgoing edges from either of them. Every path starting at nodes 2, 4, 5, and 6 all lead to either node 5 or 6.
Example 2:
Input: graph = [[1,2,3,4],[1,2],[3,4],[0,4],[]] Output: [4] Explanation: Only node 4 is a terminal node, and every path starting at node 4 leads to node 4.
Constraints:
n == graph.length1 <= n <= 1040 <= graph[i].length <= n0 <= graph[i][j] <= n - 1graph[i]is sorted in a strictly increasing order.- The graph may contain self-loops.
- The number of edges in the graph will be in the range
[1, 4 * 104].
On This Page
Also Explore
DSA Questions
Valid Tic-Tac-Toe State
DSA Questions
Number of Subarrays with Bounded Maximum
DSA Questions
Rotate String
DSA Questions
All Paths From Source to Target
DSA Questions
Smallest Rotation with Highest Score
DSA Questions
Champagne Tower
DSA Questions
Similar RGB Color
DSA Questions
Minimum Swaps To Make Sequences Increasing
DSA Questions
Find Eventual Safe States
DSA Questions
Bricks Falling When Hit
DSA Questions
Unique Morse Code Words
DSA Questions
Split Array With Same Average
DSA Questions
Number of Lines To Write String
DSA Questions
Max Increase to Keep City Skyline
DSA Questions
Soup Servings
DSA Questions
Expressive Words
DSA Questions