
Find Center of Star Graph
There is an undirected star graph consisting of n nodes labeled from 1 to n. A star graph is a graph where there is one center node and exactly n - 1 edges that connect the center node with every other node.
You are given a 2D integer array edges where each edges[i] = [ui, vi] indicates that there is an edge between the nodes ui and vi. Return the center of the given star graph.
Example 1:
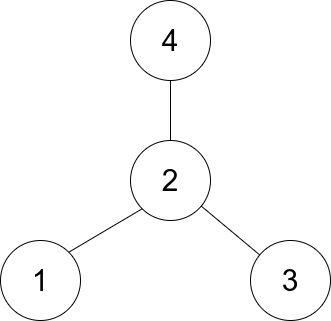
Input: edges = [[1,2],[2,3],[4,2]] Output: 2 Explanation: As shown in the figure above, node 2 is connected to every other node, so 2 is the center.
Example 2:
Input: edges = [[1,2],[5,1],[1,3],[1,4]] Output: 1
Constraints:
3 <= n <= 105edges.length == n - 1edges[i].length == 21 <= ui, vi <= nui != vi- The given
edgesrepresent a valid star graph.
On This Page
Also Explore
DSA Questions
Grand Slam Titles
DSA Questions
Minimum Elements to Add to Form a Given Sum
DSA Questions
Number of Restricted Paths From First to Last Node
DSA Questions
Make the XOR of All Segments Equal to Zero
DSA Questions
Maximize the Beauty of the Garden
DSA Questions
Primary Department for Each Employee
DSA Questions
Check if One String Swap Can Make Strings Equal
DSA Questions
Find Center of Star Graph
DSA Questions
Maximum Average Pass Ratio
DSA Questions
Maximum Score of a Good Subarray
DSA Questions
Rearrange Products Table
DSA Questions
Second Largest Digit in a String
DSA Questions
Design Authentication Manager
DSA Questions
Maximum Number of Consecutive Values You Can Make
DSA Questions