
Cheapest Flights Within K Stops
There are n cities connected by some number of flights. You are given an array flights where flights[i] = [fromi, toi, pricei] indicates that there is a flight from city fromi to city toi with cost pricei.
You are also given three integers src, dst, and k, return the cheapest price from src to dst with at most k stops. If there is no such route, return -1.
Example 1:
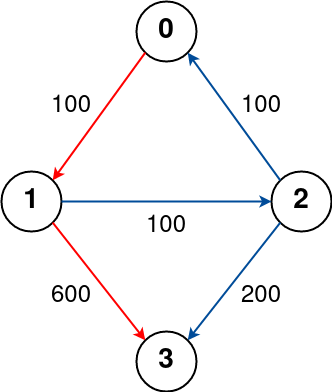
Input: n = 4, flights = [[0,1,100],[1,2,100],[2,0,100],[1,3,600],[2,3,200]], src = 0, dst = 3, k = 1 Output: 700 Explanation: The graph is shown above. The optimal path with at most 1 stop from city 0 to 3 is marked in red and has cost 100 + 600 = 700. Note that the path through cities [0,1,2,3] is cheaper but is invalid because it uses 2 stops.
Example 2:
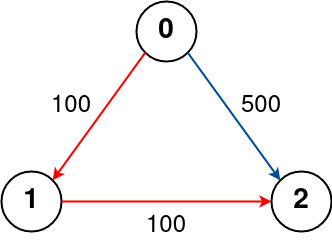
Input: n = 3, flights = [[0,1,100],[1,2,100],[0,2,500]], src = 0, dst = 2, k = 1 Output: 200 Explanation: The graph is shown above. The optimal path with at most 1 stop from city 0 to 2 is marked in red and has cost 100 + 100 = 200.
Example 3:
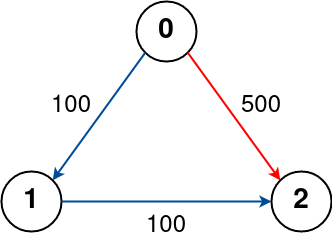
Input: n = 3, flights = [[0,1,100],[1,2,100],[0,2,500]], src = 0, dst = 2, k = 0 Output: 500 Explanation: The graph is shown above. The optimal path with no stops from city 0 to 2 is marked in red and has cost 500.
Constraints:
1 <= n <= 1000 <= flights.length <= (n * (n - 1) / 2)flights[i].length == 30 <= fromi, toi < nfromi != toi1 <= pricei <= 104- There will not be any multiple flights between two cities.
0 <= src, dst, k < nsrc != dst
On This Page
Also Explore
DSA Questions
K-th Symbol in Grammar
DSA Questions
Reaching Points
DSA Questions
Rabbits in Forest
DSA Questions
Transform to Chessboard
DSA Questions
Minimum Distance Between BST Nodes
DSA Questions
Letter Case Permutation
DSA Questions
Is Graph Bipartite?
DSA Questions
K-th Smallest Prime Fraction
DSA Questions
Cheapest Flights Within K Stops
DSA Questions
Rotated Digits
DSA Questions
Escape The Ghosts
DSA Questions
Domino and Tromino Tiling
DSA Questions
Custom Sort String
DSA Questions
Number of Matching Subsequences
DSA Questions
Preimage Size of Factorial Zeroes Function
DSA Questions
Valid Tic-Tac-Toe State
DSA Questions