
Complete Binary Tree Inserter
A complete binary tree is a binary tree in which every level, except possibly the last, is completely filled, and all nodes are as far left as possible.
Design an algorithm to insert a new node to a complete binary tree keeping it complete after the insertion.
Implement the CBTInserter class:
CBTInserter(TreeNode root)Initializes the data structure with therootof the complete binary tree.int insert(int v)Inserts aTreeNodeinto the tree with valueNode.val == valso that the tree remains complete, and returns the value of the parent of the insertedTreeNode.TreeNode get_root()Returns the root node of the tree.
Example 1:
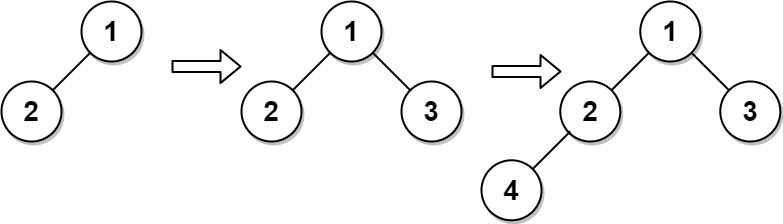
Input ["CBTInserter", "insert", "insert", "get_root"] [[[1, 2]], [3], [4], []] Output [null, 1, 2, [1, 2, 3, 4]] Explanation CBTInserter cBTInserter = new CBTInserter([1, 2]); cBTInserter.insert(3); // return 1 cBTInserter.insert(4); // return 2 cBTInserter.get_root(); // return [1, 2, 3, 4]
Constraints:
- The number of nodes in the tree will be in the range
[1, 1000]. 0 <= Node.val <= 5000rootis a complete binary tree.0 <= val <= 5000- At most
104calls will be made toinsertandget_root.
On This Page
Also Explore
DSA Questions
Online Election
DSA Questions
Sort an Array
DSA Questions
Cat and Mouse
DSA Questions
X of a Kind in a Deck of Cards
DSA Questions
Partition Array into Disjoint Intervals
DSA Questions
Word Subsets
DSA Questions
Reverse Only Letters
DSA Questions
Maximum Sum Circular Subarray
DSA Questions
Complete Binary Tree Inserter
DSA Questions
Number of Music Playlists
DSA Questions
Minimum Add to Make Parentheses Valid
DSA Questions
Sort Array By Parity II
DSA Questions
3Sum With Multiplicity
DSA Questions
Minimize Malware Spread
DSA Questions
Long Pressed Name
DSA Questions
Flip String to Monotone Increasing
DSA Questions