
Minimum Obstacle Removal to Reach Corner
You are given a 0-indexed 2D integer array grid of size m x n. Each cell has one of two values:
0represents an empty cell,1represents an obstacle that may be removed.
You can move up, down, left, or right from and to an empty cell.
Return the minimum number of obstacles to remove so you can move from the upper left corner (0, 0) to the lower right corner (m - 1, n - 1).
Example 1:
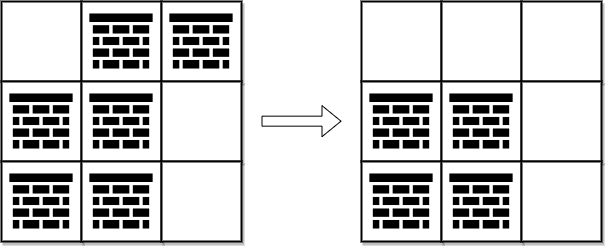
Input: grid = [[0,1,1],[1,1,0],[1,1,0]] Output: 2 Explanation: We can remove the obstacles at (0, 1) and (0, 2) to create a path from (0, 0) to (2, 2). It can be shown that we need to remove at least 2 obstacles, so we return 2. Note that there may be other ways to remove 2 obstacles to create a path.
Example 2:
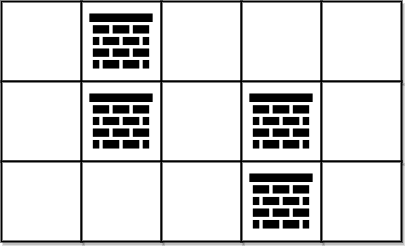
Input: grid = [[0,1,0,0,0],[0,1,0,1,0],[0,0,0,1,0]] Output: 0 Explanation: We can move from (0, 0) to (2, 4) without removing any obstacles, so we return 0.
Constraints:
m == grid.lengthn == grid[i].length1 <= m, n <= 1052 <= m * n <= 105grid[i][j]is either0or1.grid[0][0] == grid[m - 1][n - 1] == 0
On This Page
Also Explore
DSA Questions
Number of People That Can Be Seen in a Grid
DSA Questions
Sender With Largest Word Count
DSA Questions
Maximum Total Importance of Roads
DSA Questions
Booking Concert Tickets in Groups
DSA Questions
Rearrange Characters to Make Target String
DSA Questions
Apply Discount to Prices
DSA Questions
Steps to Make Array Non-decreasing
DSA Questions
Minimum Obstacle Removal to Reach Corner
DSA Questions
Maximum Profit From Trading Stocks
DSA Questions
Min Max Game
DSA Questions
Partition Array Such That Maximum Difference Is K
DSA Questions
Replace Elements in an Array
DSA Questions
Design a Text Editor
DSA Questions
Jump Game VIII
DSA Questions